Architecture
Entity-component systems
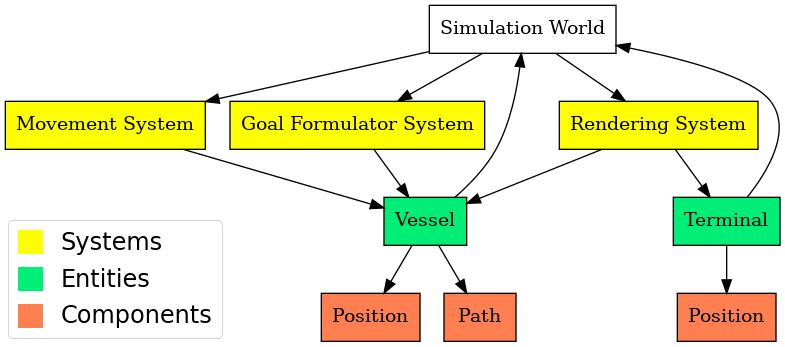
The simulation framework is based on the ESC Esper. This ECS system consists of the following elements:
- Entities: labels that represent simulated entities (vessels, berths, etc.). They have no properties or methods. Components provide properties and processors provide method implementations
- Components: data objects (such as position, velocity, etc.). They should NOT include any method or computation
- Processors: classes that process a set of entities identified by their components. For example a vessel entity might be characterized by a position, velocity and vessel_info components
As an example consider the mock simulation world in the figure below. There are two classes of entities, namely Vessel and Terminal which are respectively composed by (Position, Path) and (Position). Each system processes a subset of entities at each tick of the simulation, for example, the Rendering system will query all entities who have a Position component and display them on-screen, while the Movement system will only care about entities with Position and Path components.
Packages
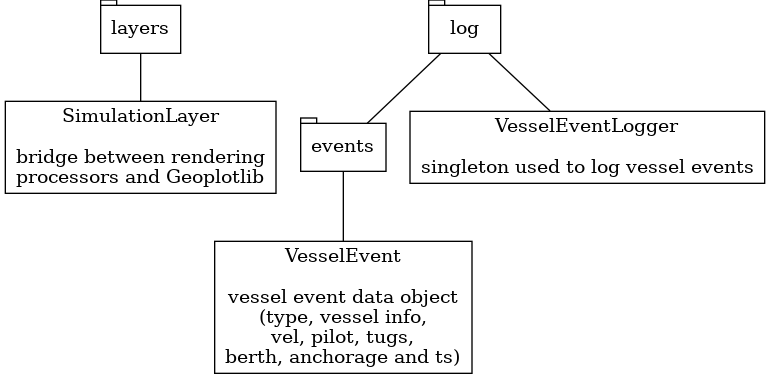
This section provides a schematic overview of the major packages that compose the simulation framework
Components

Environment

Miscellaneous
Processors

Simulated agents and infrastructure
The simulation can simulate the following agents and infrastructure components:
Agents
Vessel
The ship which needs the port services for loading/unloading cargo, maintenance, fuel, etc. The behavior of incoming vessels is simulated using the following state machine:
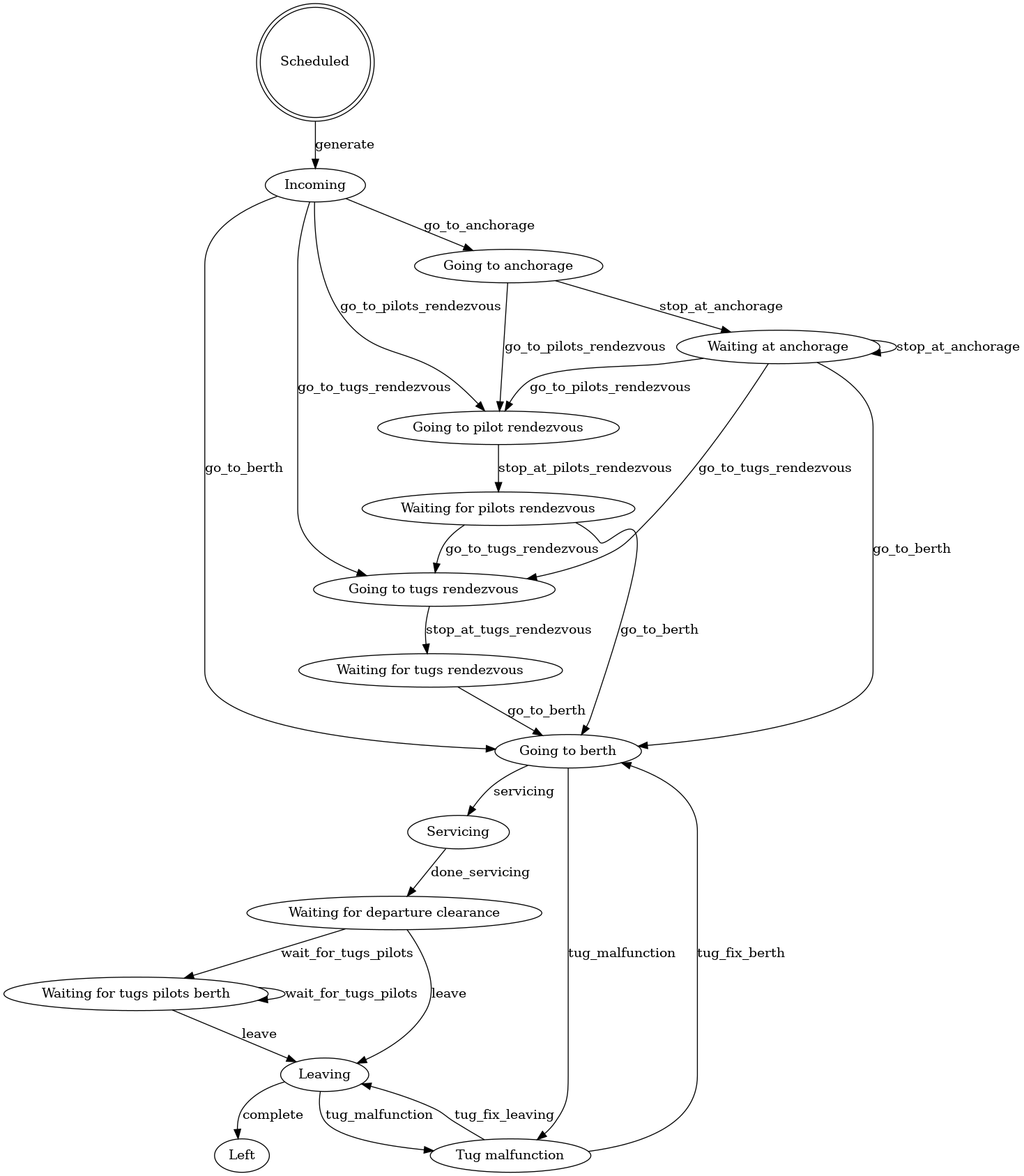
Following the previous diagrams vessels are either routed to an anchorage, a rendezvous or straight to the terminal depending on resources requests and availability (a more detailed diagram is shown in the messaging section).
The navigation of vessels is simulated using paths extracted (and augmented) from AIS data. Movement is simulated using a simple speed based model (where acceleration/deceleration is instantaneous).
Pilots
Pilots (working for the port) assist vessels entering or leaving a port. Pilots do so as they are experts of the port infrastructure and navigating big vessels in the port.
The pilots are described by the following FSM diagram:
Tugboats
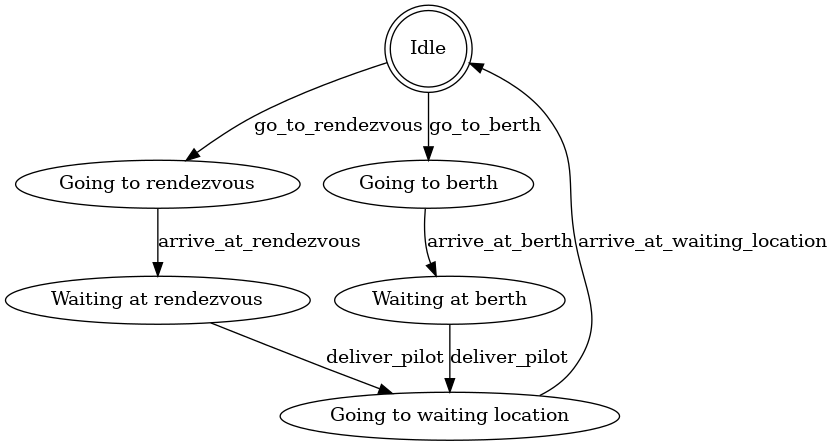
A tugboat is a strongly built powerful boat, that is used for towing and pushing (Merriam-Webster). Tugboats are used to maneuver large vessels inside the port with more accuracy and precision.
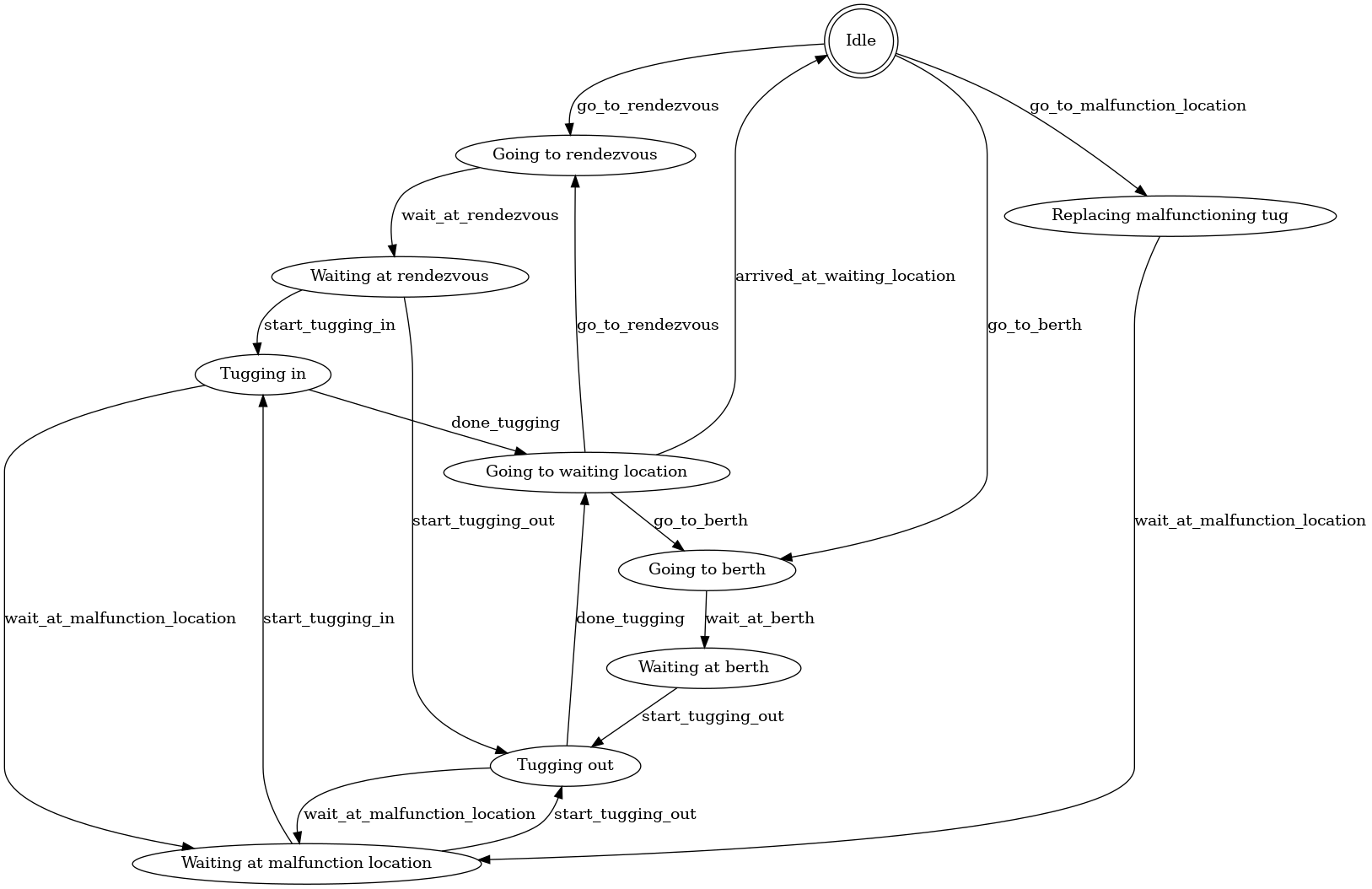
The simulated behavior of tugboats is described by the following FSM diagram:
Infrastructure
Berth
The location where a ship lies when being serviced or waiting for departure. Berths are grouped into a terminal, which is usually dedicated to a single cargo type (e.g. oil, containers, etc.)
Anchorage
An anchorage is defined as the area where vessels drop anchor, or anchor, awaiting their entry into that part of the harbour reserved for performing typical port type operations (loading, unloading, supplies, repairs, etc.), which however does not exclude these operations frequently being undertaken at the anchorages (Puertos Del Estado, 2007)
Tugboats locations
- Rendezvous locations: meeting points between vessels and tugboats where tugboats are connected to vessels and the tugging process starts
- Waiting locations: locations used to park tugboats when their services are not required
Pilot locations
- Rendezvous locations: meeting points between vessels and pilots where pilots board the vessel and pilotage starts
- Waiting locations: locations used to park pilot tender vessels when their services are not required
Port sections
The frameworks allows to separate the port waterways (navigable area inside the port) in sections. Each section has the following constraints:
- Maximum and minimum speed
Agents communication
The agents in the simulation can communicate via the MessageBroker. Each message has a sender, a receiver a message_type and an optional data property.
Simulation entities are identified by their entity id and unique agents (such as the harbour master) are identified by a string. In practice, this means that if a vessel (say entity 195) wants to send a message to the harbour master the sender will be ent:195 and the receiver will be harbour-master. Such a message can be created as follows
message = SimulationMessage(
sender="vessel:195",
destination="harbour-master",
message=VesselMessageType.CHANGE_SECTION)
In the current implementation only vessel agents communicate with the harbour-master agent which takes care of allocating port resources to the vessel. In practice this does not happen, for instance tugboat companies communicate directly with the shipping company that owns the vessel for booking tugs.
Vessel messages
Each vessel entity generates the various messages and sends them to the harbour-master. The following diagram describes which messages are sent to the harbour-master entity at each state of the vessel process (including the decisions taken by the harbour-master entity)


The harbour-master processor handles such messages based on a pluggable strategy. The default strategy is in the class DefaultVesselStrategy
Moreover, each vessel notifies the harbour-master when it enters/exits a section. These events are not handled directly by the harbour master and a modeller can handle them by setting on_enter_section and on_exit_section on the HarbourMasterProcessor class. For example:
hm_processor = HarbourMasterProcessor(
world=world,
vessel_strategy=vessel_strategy,
logger=vessel_event_logger)
# Handle the vessel exited section event
hm_processor.on_exit_section = lambda msg, ent, vessel_info: ...
Simulated anomalies
Random berth inspection
There exists a probability p that every time a vessel is serviced at a berth, it might happen that a berth inspection occurs. In which case, the berth service time is increased by a random time (or, by default, 5 hours).
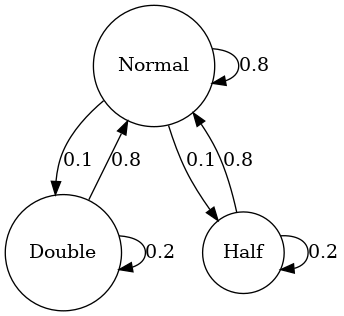
Unusual vessel velocities
Using the simulation of the Port of Rotterdam we generated anomalies related to a vessel's velocity using a Markov model. The markov model, depicted below, has three states: normal, fast and slow. In the slow and fast states the vessel's velocity is respectively divided or multiplied by a scalar. The arrows in the figure below represent the transition probabilities between states and a transition is performed every two hours (in simulation time).
Tugboat malfunction
There exists a probability t_i and t_b which denote the chances of the tugboat malfunctioning in an idle state and in a busy state respectively. If a tugboat malfunctions, then the tugboat stops in its current location and is unavailable for 5 hours. After the designated time, it is assumed that the vessel gets fixed and it proceeds to go to its waiting location for a new assignment. If the tugboat malfunctions in an idle state (without an assignment), then it does not have a big impact for vessels other than the usual unavailability consequences. If the tugboat malfunctions and was on its way to a tugboat rendezvous, then a different tugboat is assigned to that vessel. If a tugboat malfunctions when it is tugging a vessel, then the vessel (and all other tugging tugboats) stop and wait for a replacement tugboat to arrive. If a replacement tug is not available, then this check is performed again in 30 simualation minutes (so as to reduce computational overhead a bit). The vessel (and tugboats) waits until the required amount of tugboats is present.